


Schweizer Technologie: Diese Roboterhand kann greifen wie ein Mensch

Eine an der EPFL entwickelte Roboterhand kann verschiedene Gegenstände aufheben. Dank flexibler Materialien und Strukturen kann sie greifen wie ein Mensch.
Das Wichtigste in Kürze
- Die Hand hat Federgelenke und eine «Haut» aus Silikon.
- Sie kann Gegenstände ergreifen, ohne dass sie jedes Mal neu programmiert werden muss.
- Flexible Roboter könnten in für Menschen konzipierten Umgebungen eingesetzt werden.
Wenn wir unsere Hand nach einem Gegenstand ausstrecken, zum Beispiel nach einer Flasche, müssen wir normalerweise nicht wissen, wo genau im Raum sie sich befindet, um sie sicher zu greifen. Bei einem Roboter ist das anders. Er muss die Koordinaten eines Objekts sehr genau kennen, um es greifen zu können. «Wir Menschen brauchen nicht so viele Informationen, um einen Gegenstand zu greifen. Wir glauben, dass dies an den flexiblen Interaktionen liegt, die an der Schnittstelle zwischen Objekt und Hand stattfinden», erklärt Kai Junge, Doktorand an der Fakultät für Ingenieurwissenschaften und Technologie der Eidgenössischen Technischen Hochschule Lausanne (EPFL). «Genau diese Flexibilität interessiert uns für die Roboter.»
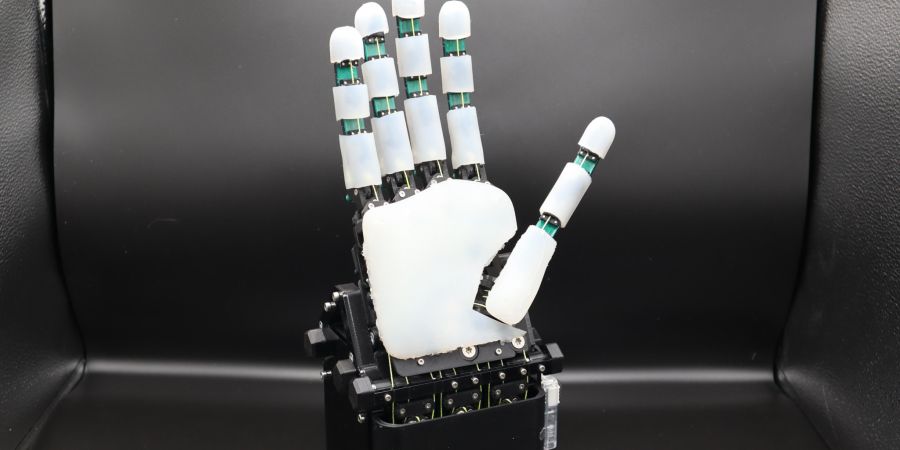
Die von den EPFL-Forschenden entwickelte Roboterhand ADAPT (Adaptive Dexterous Anthropomorphic Programmable sTiffness) verwendet flexible Materialien: Silikonstreifen, die um ein Handgelenk und mechanische Finger gewickelt sind, sowie Federgelenke, die mit einem faltbaren Roboterarm kombiniert sind. Dank dieser Flexibilität kann die Hand unterschiedliche Gegenstände greifen. Ihre Bewegungen erfolgen automatisch, ohne dass sie vorher programmiert werden müssen. In einer Versuchsreihe konnte die ferngesteuerte Roboterhand 24 Objekte mit einer Erfolgsquote von 93 Prozent greifen.
Eine herkömmliche Roboterhand braucht für jedes Gelenk einen Motor. Die EPFL-Hand kommt für ihre 20 Gelenke mit 12 Motoren aus, die im Handgelenk untergebracht sind. Der Rest der mechanischen Steuerung kommt von den Federn und der Silikonhaut.
Egal ob Schraube oder Banane
Die Hand wird so programmiert, dass sie sich zu Anheben eines Objekts an vier Positionen bewegen kann. Alle anderen Anpassungen, die notwendig sind, um die Aufgabe auszuführen, erfolgen ohne zusätzliche Programmierung oder Rückmeldungen. In der Robotik spricht man von einer Steuerung im offenen Regelkreis. Mit einer einzigen Programmierung kann der Roboter unterschiedliche Objekte greifen – von einer einfachen Schraube bis hin zu einer Banane.
Das klingt einfach, aber «die Entwicklung von Robotern, die Interaktionen oder Aufgaben ausführen können, die Menschen automatisch erledigen, ist viel schwieriger, als die meisten Menschen denken», sagt Kai Junge. Die neue Schweizer Technologie könnte den Einsatz von Robotern in hochgradig unvorhersehbaren oder für Menschen konzipierten Umgebungen erheblich verbessern.













